
Technische Daten:
| Item | Trion P1 |
|---|---|
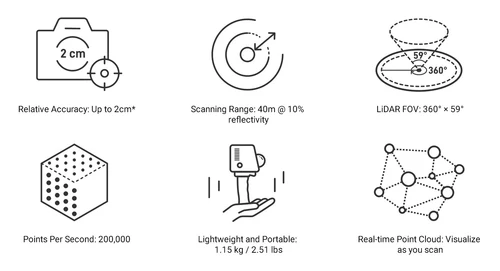
| Weight | 1.05 kg |
| Scanning Range | 40m@10% reflectivity |
| Scanning Point Frequency | 200,000 points/second |
| Dimensions | 160 × 120 × 270 mm (excluding camera) |
| Camera Resolution | 5760 × 2880 @ 30 fps |
| Camera Field of View (FOV) | 180° |
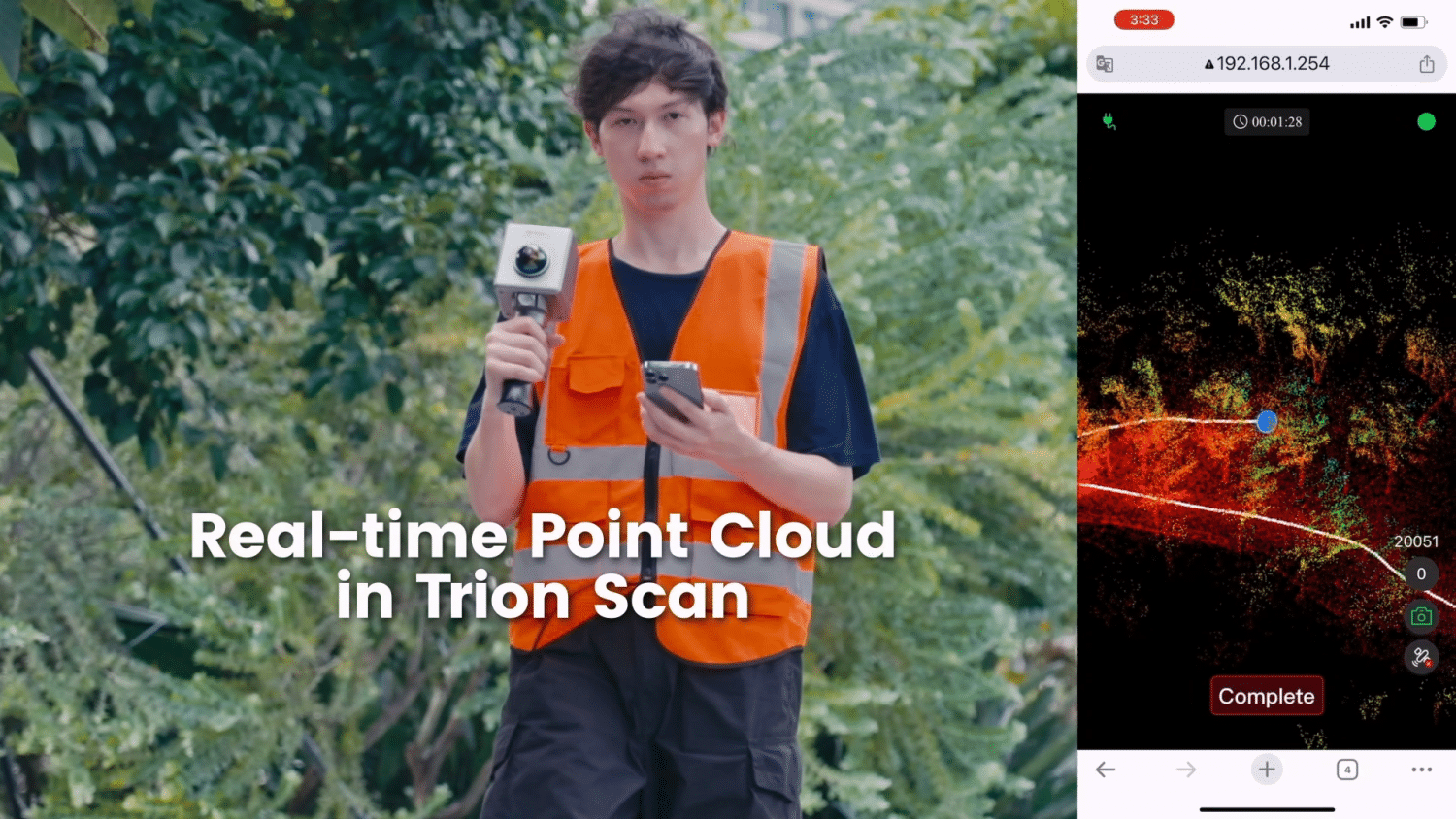
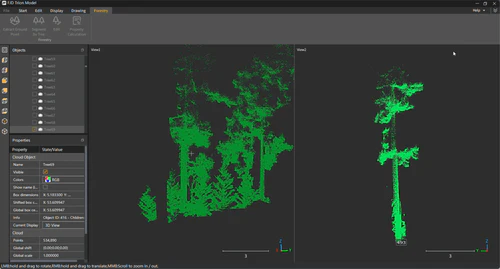
| Processing/Display | Real-time |
| Protection Class | IP54 |
| Number of Laser Heads | 1 |
| Laser Class | Eye-safety Class I |
| Relative Accuracy | Up to 2cm |
| Storage Capacity | 512 GB |
| Operating Temperature | -10℃ ~ 45℃ |
| Battery Life | 2H (grip battery, room temperature) |
Videos & Downloads: