


Ratgeber
Präzision im Fokus: Unser GNSS-Service im Detail
Entdecke unseren GNSS-Service für höchste Präzision in Vermessungen. Erfahre mehr über unsere Testmessungen und Expertise.
Hast Du Fragen oder
brauchst Du Unterstützung?
Akkurate Vermessung für Bauprojekte ist heutzutage ohne satellitengestützte Daten nicht mehr denkbar. Die Möglichkeiten sind vielfältig, die Verwendung einfach. Wenn das Thema für Dich in nächster Zeit ansteht, dann hast Du die richtige Seite gewählt. Wir bieten Dir Geschichte, Hintergründe, Erklärungen und eine intensive Kaufberatung. GNSS Vermessung einfach erklärt, lies gleich weiter!
ls in den 60er Jahren die ersten Satelliten in den Weltall geschossen wurden, dachte noch niemand an ein System zur Standortbestimmung. Viel wichtiger waren Themen wie Spionage, aber auch Telekommunikation und Funkübertragungen. Für Funk- und Telekommunikation mussten die Satelliten in eine Geostationäre Laufbahn geschossen werden. Aufklärungssatelliten fliegen im Gegensatz dazu in der von allen Satelliten niedrigsten Umlaufbahn. Dafür können Sie bei guten Bedingungen auch Zeitungsüberschriften oder Nummernschilder entziffern.
Die Positionsbestimmung für Autos und LKW war schon in den frühen 80er Jahren ein Traum, den die Unternehmen versucht haben, mit Sensoren an den Rädern und gespeichertem Kartenmaterial Wirklichkeit werden zu lassen, doch nie mit wirklich zählbarem Erfolg. Dies änderte sich mit der Freigabe des GPS, dem Global Positioning System der US-Luftwaffe.
Derzeit sind 30 Satelliten notwendig, um weltweit eine geeignete Abdeckung zu erreichen. Da die Satelliten nur eine begrenzte Lebensdauer haben, werden sie regelmäßig durch neuere ersetzt, wodurch auch die Genauigkeit im Laufe der Jahre entscheidend verbessert werden konnte. Zusätzlich werden immer ein paar Ersatzsatelliten in die Umlaufbahn gebracht, damit das System nicht zusammenbricht, wenn ein aktiver Satellit ausfällt oder gewartet werden muss.
Das NAVSTAR-GPS – so der vollständige Name – ist nicht das erste System dieser Art. Das Sowjetische/Russische GloNaSS wurde ein Jahr früher mit der Planungsphase gestartet, die Fertigstellung wurde ebenfalls ein Jahr vor dem GPS verkündet. Allerdings mussten die Betreiber große Rückschläge einstecken durch Abstürze von Satelliten, so dass erst im Jahr 2011 ein wirklich nutzbares System zur Verfügung stand.
Inzwischen sind neben GloNaSS und GPS noch zwei weitere Systeme verfügbar bzw. im Aufbau: BeiDou und Galileo. Indien und Japan betreiben daneben ergänzend noch lokal verfügbare Satellitensysteme, die in geosynchronem Orbit vier (Japan) bzw. sieben (Indien) Satelliten die Erde umkreisen lassen. Diese Systeme sind nur für den Einsatz in den jeweiligen Ländern vorgesehen.


Das GPS wird von der amerikanischen Luftwaffe betrieben, weshalb der primäre Einsatzzweck die Steuerung von Truppenbewegungen und ähnliches ist. Es ist so ausgelegt, dass die zivile Nutzung jederzeit eingeschränkt oder abgeschaltet werden kann. Auch können jederzeit unscharfe Signale eingestreut werden, welche die zivile Nutzung erschweren. Für GloNaSS gilt übrigens das gleiche. Erst im Jahr 2000 wurde GPS mit allen Möglichkeiten auch für die zivile Nutzung freigeschaltet. Davor war eine Positionsbestimmung nur zwischen 50 und 100 Metern möglich – nun sind es 2-5 Meter.
Für die Vermessung auf dem Bau benötigen wir allerdings eine ganz andere Genauigkeit. Wie die erreicht wird, erklären wir in einem späteren Kapitel.
Die für das GNSS verantwortlichen Satelliten fliegen in einer konstanten Höhe von 20.000 bis 23.000 km – je nach Betreiber. Über normale Funkwellen senden die Satelliten ständig wiederkehrende Informationen:
Der Empfänger gleicht die Positions- und Uhrzeitmeldungen der erreichbaren Satelliten miteinander ab. Da die Funkwellen einige Zeit benötigen, um vom Sender zum Empfänger zu gelangen, kann dieser anhand des zeitlichen Versatzes den Abstand bestimmen. Sind vier oder mehr Satelliten erreichbar, kann die Position bestimmt werden, und zwar inklusive der Höhe über Normal-Null. Je mehr Satelliten empfangen werden, desto genauer wird die Positionsbestimmung.
Moderne Geräte werten dabei die Daten der Satelliten aller verfügbaren Systeme aus, und nicht nur GPS, wie allgemein angenommen wird. Auch dadurch wird die Genauigkeit noch verbessert.
Video by Paulsava – Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=47210072
Bei der Vermessung dürfen keine Abweichungen oder Ungenauigkeiten im Meterbereich auftreten, sondern allenfalls Zentimeter, wenn nicht sogar Millimeter. Die Messung der Zeit eines Funksignals – das sich mit Lichtgeschwindigkeit bewegt – um daraus Entfernungen abzuleiten, erfordert hochpräzise Messmethoden. Selbst damit ist aber nur eine Genauigkeit im einstelligen Meterbereich erzielbar (zwei bis fünf Meter). Die Signalgeschwindigkeit der Satelliten ändert sich je nachdem, ob sich das Signal gerade in der Troposphäre oder in der Ionosphäre befindet – und ist damit weiteren Abweichungen unterworfen (Punkt 2). Schließlich kann die Topographie, aber auch Gebäude, Bewaldung und die Witterung zu Ungenauigkeiten führen (Punkt 3). Auch eine ungünstige Verteilung der Satelliten am Himmel (eng beieinander) führt zu Ungenauigkeiten in der Messung (Punkt 1). Diese und weitere Fehlerquellen müssen durch geeignete Methoden korrigiert werden.
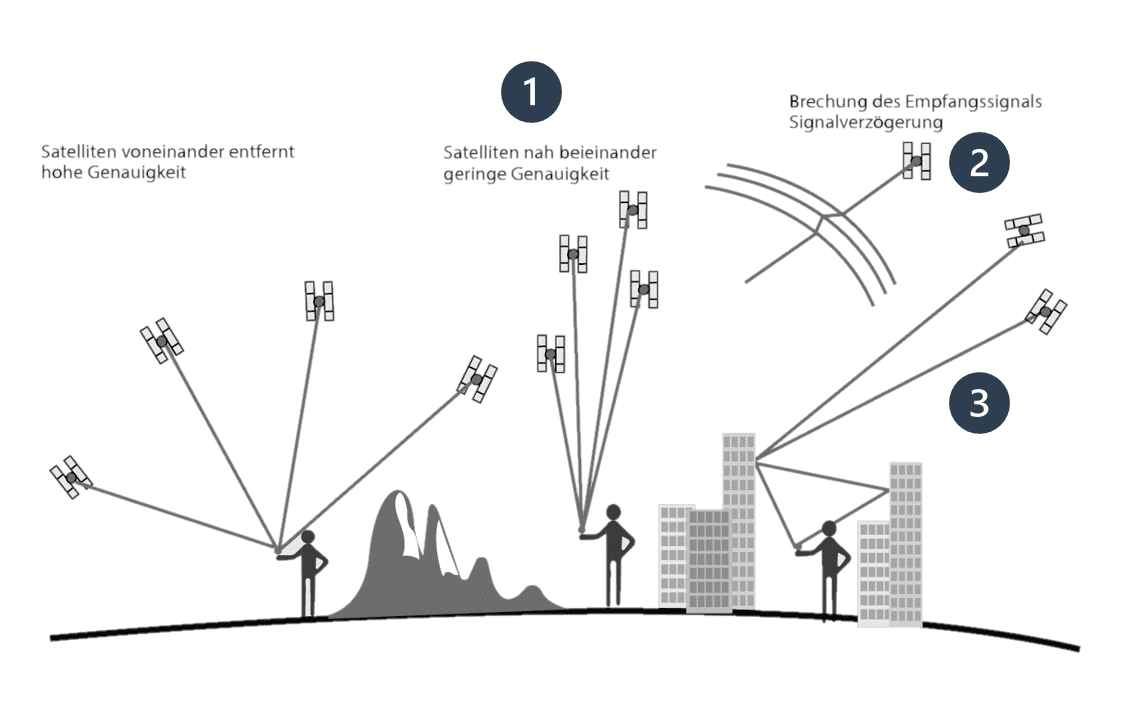
Ein Maß, das unmittelbar mit der Güte der Satelitenkostellation zusammenhängt ist der PDOP Wert (Position Dilution of Precision – kurz Positionsgenauigkeit). Er gibt die Streubreite der zu erwartenden Messung an und wird häufig bei GNSS Empfängern mit angegeben. Bestmöglicher Wert ist 1, ein Wert von 6 ist ebenfalls noch “ok”. Messungen mit PDOP Wert > 10 lassen keine Auswertung mehr zu.
Beim differentiellen GNSS kurz DGNSS wird die Position eines GNSS Empfängers, der fest an einem genau bekannten Punkt steht, zur Bestimmung des aktuellen Fehlers genutzt (Basis- oder auch Referenzstation). Da die Koordinaten bekannt und fest sind, muss jede gemessene Abweichung von diesem Punkt aus ein Messfehler sein. Der somit ermittelte Fehler gilt für alle Empfänger, die sich in einem bestimmten Umkreis um diesen bekannten Punkt befinden.
Ist man nun mit einem Empfänger, z.B. einem GNSS Messstab (Rover) unterwegs und werden diesem die Informationen über den aktuellen Fehler von der Basisstation übermittelt, so kann die Genauigkeit deutlich verbessert werden. Diese Informationen werden auch als Korrekturdaten bezeichnet.
Genauigkeit: bis 1 m
Für Bauvermessung zu ungenau
Bei dieser Form des DGPS wird das Signal geostationärer Satelliten (Satelliten, die uns nicht umkreisen, sondern immer am gleichen Ort stehen) hinzugezogen, dessen Position naturgemäß bekannt ist und gleich bleibt. Dadurch entsteht eine verlässlichere Datenbasis. Es sind auf dieser Grundlage einige verschiedene Dienste weltweit verfügbar. Der für den europäischen Raum wichtigste ist EGNOS, der European Geostationary Navigation Overlay Service. Gleichmäßig weltweit verteilte Stationen (sog. RIMS – Ranging and Integrity Monitoring Stations) sammeln sekündlich Rohdaten der GPS- und GLONASS-Satelliten sowie das entsprechende GPS-ähnliche Signal zur Entfernungsmessung der beteiligten geostationären Satelliten.
Dienste dieser Art existieren auch für andere Länder wie USA, Japan oder Indien. Der Aufbau der Daten ist so ähnlich, dass jedes EGNOS-Gerät auch mit dem amerikanischen WAAS, dem japanischen MSAS und dem indischen GAGAN arbeiten kann.
Die RIMS-Daten werden zentral gesammelt und für die Berechnung von Korrekturdaten verwendet. Anschließend werden diese Korrekturdaten an die geostationären Satelliten weitergeleitet und von dort an die Nutzer von z.B. EGNOS verteilt.
Die Genauigkeit der Positionsbestimmung sinkt dadurch im Idealfall auf unter einen Meter.
Genauigkeit: < 1 m
Für Bauvermessung zu ungenau
Diese Messmethoden stellen die Spitze der Genauigkeit dar. Das RTK-Verfahren funktioniert vom Prinzip her gleich wie das oben beschriebene DGNSS-Verfahren, verwendet jedoch zusätzlich noch Phaseninformationen der empfangenen Satellitensignale. Diese Beschreibung ist stark vereinfacht, um nicht zu sehr ins wissenschaftliche Metier abzudriften.
Die Genauigkeit dieser Methode liegt im einstelligen Zentimeterbereich (1-2 cm) und kann unter idealen Bedingungen lediglich 2 mm betragen. Neben Aufgaben in der Vermessung werden diese Daten noch für Wasserstandsmessungen und automatisierte, fahrerlose landwirtschaftliche Geräte verwendet. Gleich wie bei DGNSS werden Korrektudaten benötigt. Der Zugriff auf diese Dienste ist mit wenigen Ausnahmen kostenpflichtig.
Es gibt unterschiedliche Möglichkeiten dem Rover diese Korrekturdaten zukommen zu lassen. Neben Funk existiert noch die Datenübertragung mittels mobilen Internets. Letzteres hat sich aufgrund der einfachen Handhabung als Standard in der Vermessungsbrache durchgesetzt.
Genauigkeit: 1-2 cm
Standard für die moderne Bauvermessung
Nachfolgend wird auf die Datenübertragung mittels Mobilfunknetz näher eingegangen. Deutschlandweit sind je nach Anbieter bis zu 250 Referenzstationen verteilt, die eine hohe Flächenabdeckung sicherstellen. Die jeweils nächsten Stationen zum Empfänger schicken ihre Korrekturdaten in Echtzeit zum Empfänger.
In Deutschland sind vier solcher Dienste verfügbar, die sich teilweise gegenseitig Konkurrenz machen. Die meisten davon sind kostenpflichtig. Wir schauen sie uns einmal genauer an.
Der SAPOS ist entstanden als Gemeinschaftsprojekt der Arbeitsgemeinschaft der Vermessungsverwaltungen der Länder Deutschlands, ist also eine staatliche Einrichtung. Der Dienst wird in drei verschiedenen Qualitätsstufen angeboten:
Die Open Data Länder sind Brandenburg, Hessen, Niedersachsen, Nordrhein-Westfalen, Sachsen und Thüringen sowie die Städte Berlin und Bremen. Baden-Württemberg hat jüngst ebenfalls den Schritt zum Open Data Land gemacht. Link zur zentralen SAPOS Stelle.
Falls es absehbar ist, dass der Empfänger ausschließlich in einem Open Data Land verwendet wird, dann sind die Kosten noch geringer. Nach einer einmaligen Anmeldegebühr (z.B. 150€ für Baden Württemberg) können die Daten im jeweiligen Bundesland kostenlos empfangen werden!
Trimble ist ein Hersteller für Präzisions-Vermessungsgeräte, die in Landwirtschaft, Kartographie und bei Bauvorhaben zum Einsatz kommen. Als zusätzlichen Service stellt Trimble mit „VRS now“ einen Satellitenreferenzdienst zur Verfügung, der eine Genauigkeit von 2-3 cm verspricht. VRS now greift auf die Daten aller vom Empfänger sichtbaren Satelliten zurück und erhält zudem alle SAPOS-Daten, dank einer Kooperation. Der Dienst soll, dank der Trimble-Hardware, der schnellste Service dieser Art sein.
Die Preise sind sehr einfach strukturiert, denn Trimble bietet nur eine Ausbaustufe an. Es kann ein Stundenkontingent von 100 Stunden für 990,- Euro erworben werden, das zwei Jahre gültig ist. Einzige Alternative dazu ist eine für ein Jahr gültige Flatrate für 3.000,- Euro.
Leica gibt an, über das größte Netzwerk an Referenzstationen zugreifen zu können. Ganz korrekt ist das nicht, denn alle Stationen weltweit können im Prinzip von jedem genutzt werden. Es sind insgesamt 4.500, und auch für VRS now wird diese Anzahl an Stationen angegeben.
Leica bzw. der Dienstleister Hexagon bieten das HxGN SmartNet in zwei Varianten an. Der normale Dienst hat eine Genauigkeit von 25 cm. Diesem Dienst kann die sogenannte ‚Transformation‘ zugebucht werden. Darunter ist zu verstehen, dass die Anzahl der verwendeten Datenquellen und damit die Menge der Korrekturdaten erhöht – und mittels Post-Processing in das Ergebnis eingerechnet wird – wodurch eine Genauigkeit von 2 cm möglich ist.
Leica bzw. Hexagon bietet Stundenkontingente für die Daten an, die jeweils ein Jahr gültig sind. Die Preisliste beginnt bei 60 Stunden für 450,- Euro und geht bis 240 Stunden für 1.200,- Euro. Der Transformationsdienst macht die Sache spürbar teurer. Das Kontingent mit 60 Stunden wird dann für 1.000,- Euro verkauft, 240 Stunden kosten verhältnismäßig günstige 1.800,- Euro. Eine Flatrate ist bei Leica nicht vorgesehen.
Wenn die Positionsdaten tatsächlich millimetergenau sein sollen, dann steht einem Bauunternehmer immer die Möglichkeit offen, eine eigene Referenzstation zu errichten. Diese wird in unmittelbarer Nähe des Bauprojekts aufgestellt und die Korrekturdaten werden via Funk (UHF-Band oder Mittelwelle) ausgetauscht. Viele moderne Rover können als Empfänger, oder auch als Basisstation verwendet werden.
Diese Möglichkeit kommt auch dann in Frage, wenn bei dem Bauvorhaben kein Mobilfunknetz Empfang vorhanden ist.
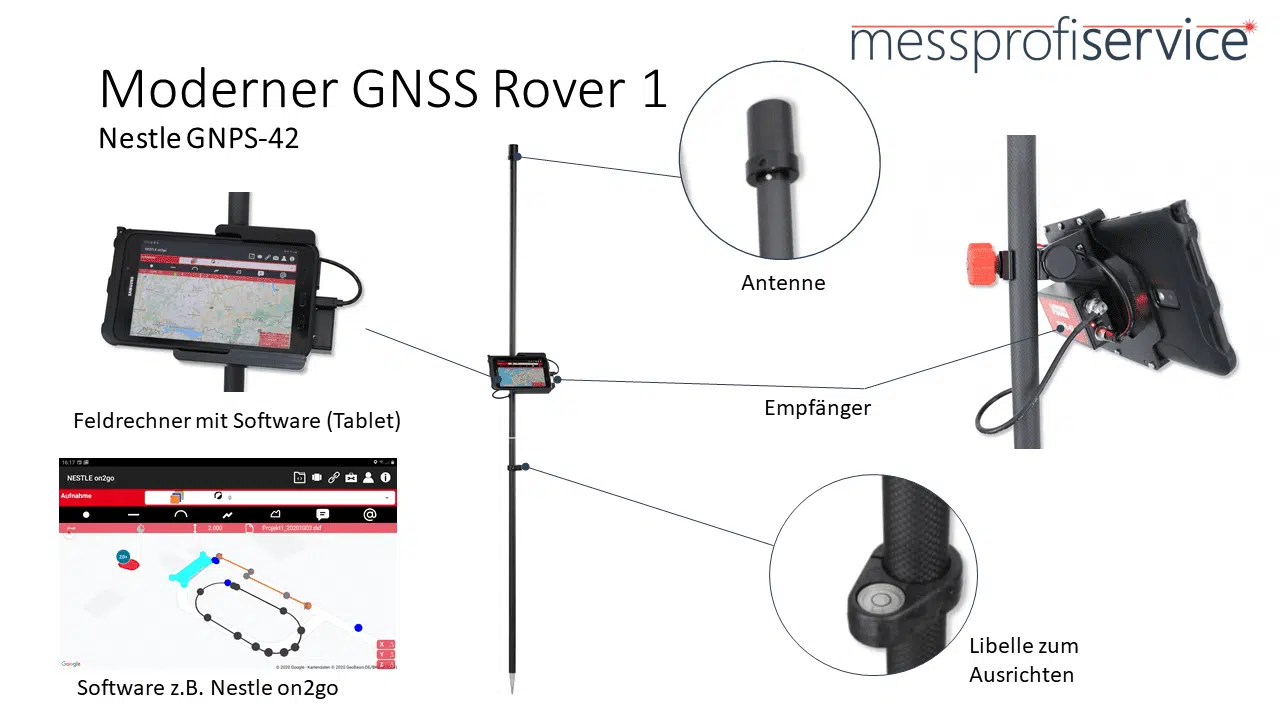
Messstäbe, sogenannte ‚GPS Rover‘, werden mit der Spitze an die zu vermessende Stelle am Boden gehalten. Am Stab ist ein sogenannter Feldrechner angebracht, der die aktuelle Position anzeigt.


In der Bedienung des Rovers unterscheiden sich die einzelnen Modelle. Bei der einfachsten Bauart wird der Stab mittels einer Libelle (zweidimensionale Wasserwage) in die Senkrechte gebracht, um ein akkurates Messergebnis zu liefern.
Voll ausgestattete Rover können die Schräglage und die Ausrichtung entlang der Drehung auf der Achse des Stabes ermitteln, und so – unter Einberechnung der Länge des Stabes – die Position der Spitze errechnen. Dies funktioniert auch, wenn der Stab zum Beispiel schräg in ein Kanalrohr gehalten wird, das ansonsten eine Messung verhindern würde. Solche Systeme sind aufgrund der dafür notwendigen zusätzlichen Messtechnik (IMU) deutlich teurer.
Neben der Kompensation der Schräglage, die als ‚Tilt Correction‘ bezeichnet wird, übernehmen Feldrechner noch weitere Aufgaben. Sie können Abstände und Strecken zwischen einzelnen Messpunkten, die Fläche bei zweidimensionalen Messungen sowie das Volumen innerhalb von Messpunkten berechnen.
Trotz der oben aufgeführten Informationen ist es Dir noch nicht möglich, die technischen Daten eines Rovers vollumfänglich zu verstehen. Die Technik ist komplex, die Berechnungen sowieso. Deshalb gehen wir nachfolgend die wichtigsten Daten eines Rovers durch und versuchen Licht ins Dunkle zu bringen.
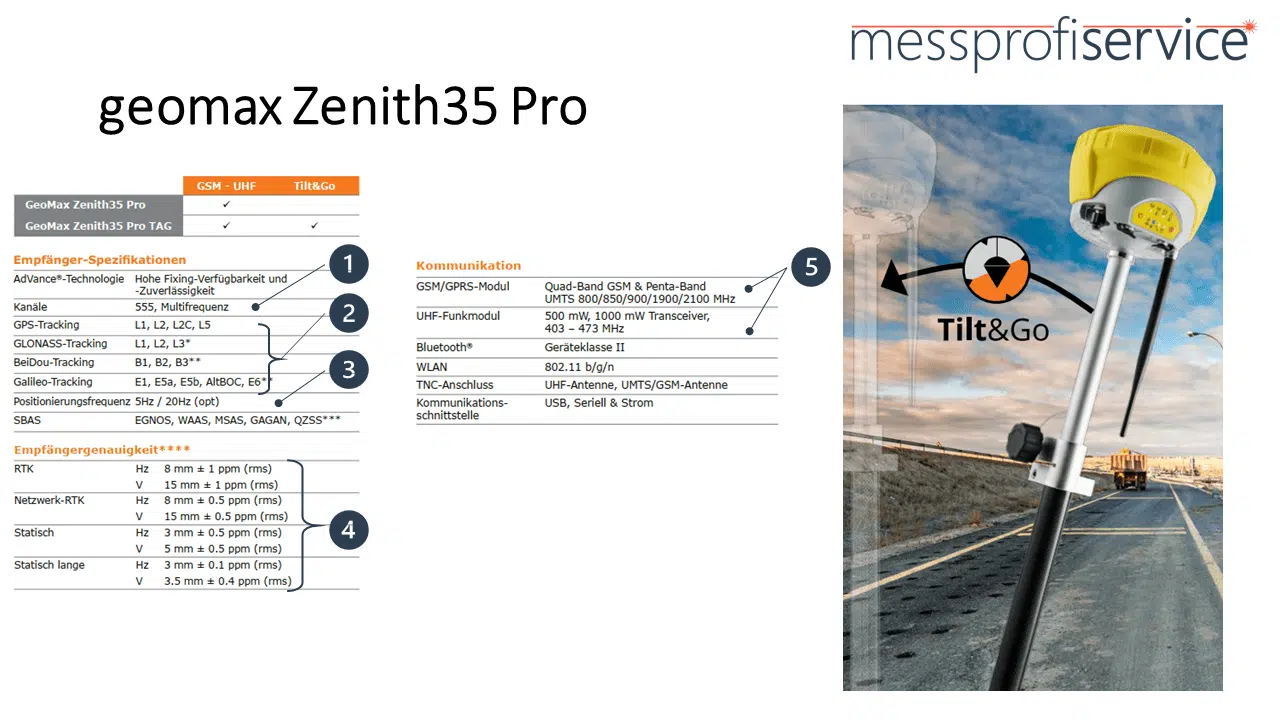
In einem Kanal wird das Signal eines Satelliten verarbeitet. Für eine Positionsbestimmung sind mindestens 4 Satelliten, also 4 Kanäle notwendig. Moderne GNSS Empfänger können jedoch nicht nur ein Satelliten-System, sondern mehrere empfangen (GPS, Beidou, Glonass, Galileo). Da jeder Satellit seine Informationen auf 3 Frequenzen sendet, kommt schnell eine beachtliche Summe an Kanälen zusammen. Je mehr Kanäle ein Empfänger hat, desto mehr Informationen können theoretisch für die Positionsbestimmung empfangen werden.
Wie viel Kanäle sind denn sinnvoll?
Im nachfolgenden Bild ist die Anzahl der Satelliten dargestellt, die am 05.11.2020 über Leutkirch im Allgäu zu empfangen waren. Um 05:20 Uhr morgens war das Maximum mit 39 Satelliten (gesunde Satelliten) erreicht.
39 Satelliten x 3 Frequenzbänder = 117 Kanäle
Eine hohe Anzahl an Kanälen ist sinnvoll, aber teilweise wird die Kanalanzahl als Marketinginstrument missbraucht.

Jeder Satellit sendet seine Informationen gleichzeitig mit 3 verschiedene Frequenzen innerhalb einer definierten Bandbreite. Wird ein Signal gestört, so besteht noch die Möglichkeit das Satellitensignal über die anderen beiden Frequenzen zu erhalten. Die Signalbezeichnung hängt vom jeweiligen Satelliten-System ab. So werden die Signale bei GPS mit L1, L2, L5 bezeichnet, wohingegen bei Glonass die Bezeichnung G1, G2, G3 lautet. Je nach Empfänger können alle, 2 oder nur eine Frequenz empfangen werden.
Frequenz mit der die Position bestimmt wird. 5 Hz bedeutet, dass 5 mal pro Sekunde die Position ausgegeben wird. Von Vorteil, wenn schnell viele Punkte aufgezeichnet werden sollen, z.B. bei Dauermessung.
Das Genauigkeitsmaß RMS (oder auch 1dRMS – one distance root mean square).bedeutet, dass ca. 66% alle Messpunkte innerhalb eines Kreises mit dem Radius des angegebenen Wertes liegen. Die Genauigkeit wird in horizontale (Hz) und vertikale (V) Genauigkeit angegeben, wobei die Positionsbestimmung in der Ebene (Hz) genauer ist. PPM steht für parts per million und bezieht sich auf Streckenmessungen. 1 ppm ist der millionenste Teil einer Strecke. Auf 1 km entspricht dies einer Abweichung von 1mm.
Abhängig von der Art der Messung kann eine unterschiedliche Genauigkeit erreicht werden:
| RTK: | RTK Messung, Korrekturdaten von einer Basisstation |
| Netzwerk-RTK: | RTK Messung, Korrekturdaten von Korrekturdatenservice, z.B. SAPOS |
| Statisch: | Langzeitmessung < 30 min |
| Statisch lange: | Langzeitmessung > 30min |
Die Korrekturdaten müssen den Rover erreichen können. Moderne Empfänger haben die Möglichkeit die Korrekturdaten über mehrere Medien zu empfangen. Darunter Funk (UHF Funkmodul) oder auch Mobilfunk/Internet empfangen (GSM: GPRS, Edge; UMTS: 3G). Wichtig: Der Mobilfunkstandard 3G wird von einigen Mobilfunkanbietern ab 2021 schrittweise abgeschaltet. Der Empfang der Korrekturdaten über UTM (3G) ist somit nicht mehr möglich!
Wir haben es getestet. Schau Dir hierzu unser Video zum GNPS-42 an.
Weil die Möglichkeiten der Vermessung auf Basis satellitengestützter Daten so vielfältig sind, bieten wir Dir einen Beratungsservice an, der Dir alle Informationen liefert, damit Du die für Dich perfekt passende Auswahl treffen kannst. Hier eine kleine Auswahl möglicher Anwendungsfelder:
Inhaltsübersicht

Mathias Taube
Dein Ansprechpartner
info@messprofiservice.de
+491772177750
Bleibe uptoDate!
Melde Dich jetzt zu unserem Newsletter an und verpasse keine Neuigkeiten, wichtige Updates oder Angebote mehr. Den Newsletter erhältst Du maximal 1x pro Monat und Du kannst ihn jederzeit widerrufen.
Entdecke unseren GNSS-Service für höchste Präzision in Vermessungen. Erfahre mehr über unsere Testmessungen und Expertise.
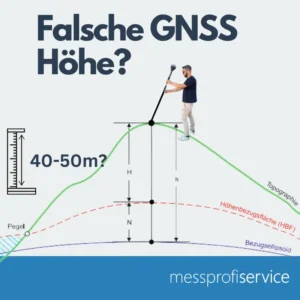
Falsche Höhen bei GNSS-Messung, von kleinen Abweichungen im cm-Bereich bis zu 40-50m ist alles dabei. Warum ist das so?
Beitrag Teilen
Sicherer und schneller Versand

Sichere und bequeme Zahlungsarten

Alle Preise zzgl. MwSt. und zzgl. Versand
Sie sehen gerade einen Platzhalterinhalt von Calendly. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von Instagram. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr Informationen
{kind=link}
{kind=link}
{kind=link}